应用领域








为精密测量与精确称重而生




about us
关于我们
大洋传感器成立于2009年,核心团队由国内优秀的科技研发、生产品控和市场人员组成。作为国家高新技术企业,公司秉承“质量铸就品牌,服务赢得信赖”的服务原则,致力于建立民族一流的智能传感器品牌,坚持不断创新,为客户提供高性能、高可靠性的传感器产品和专业的技术服务。
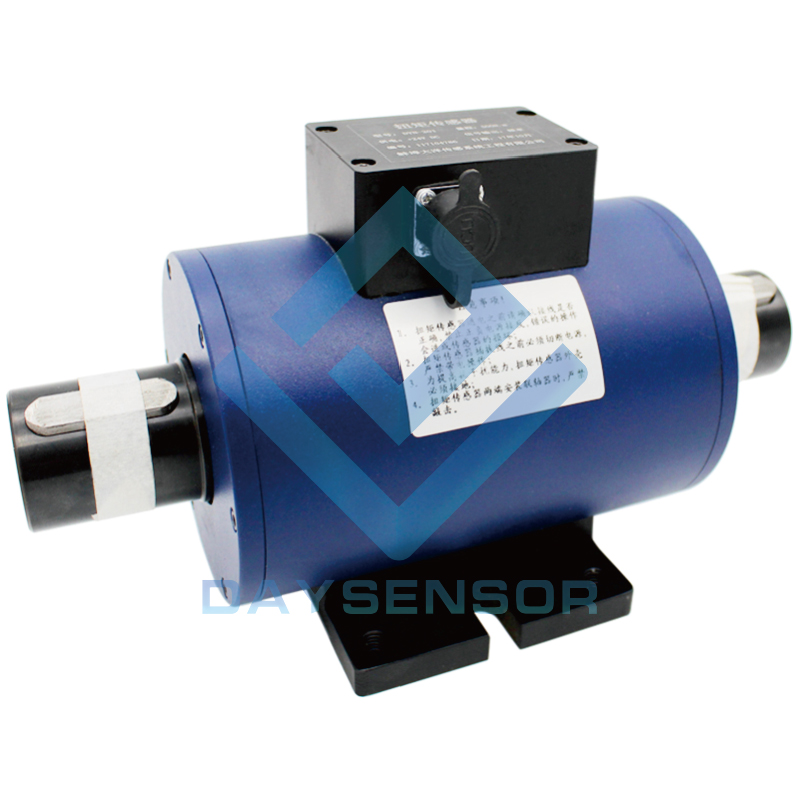
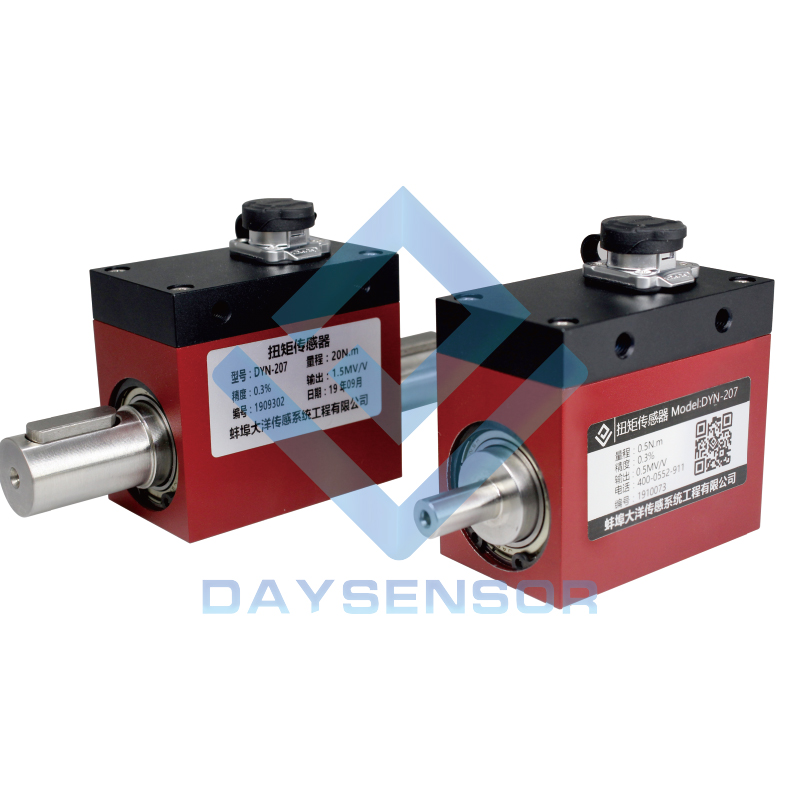
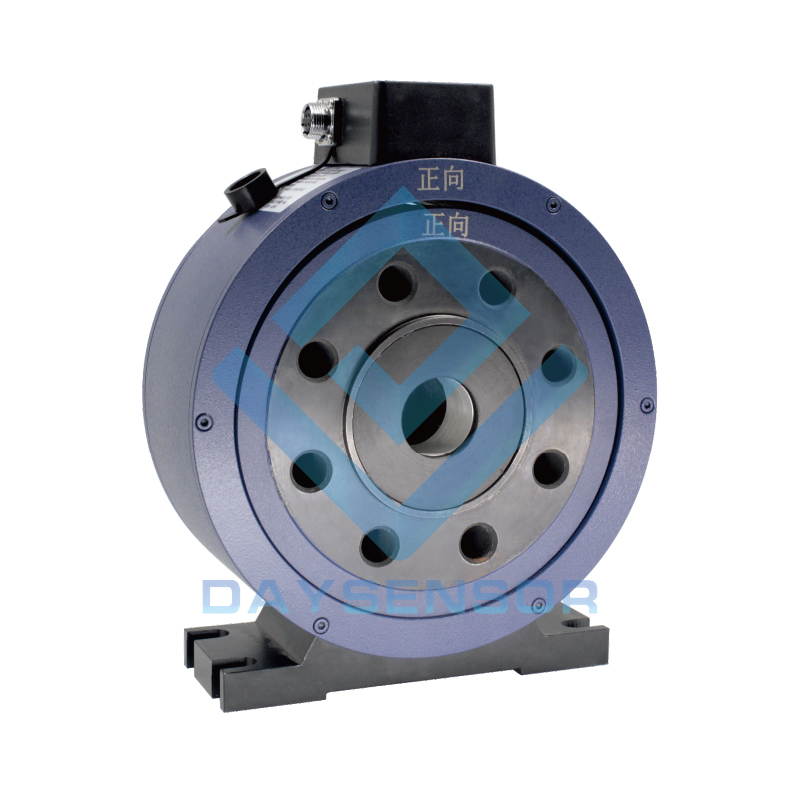
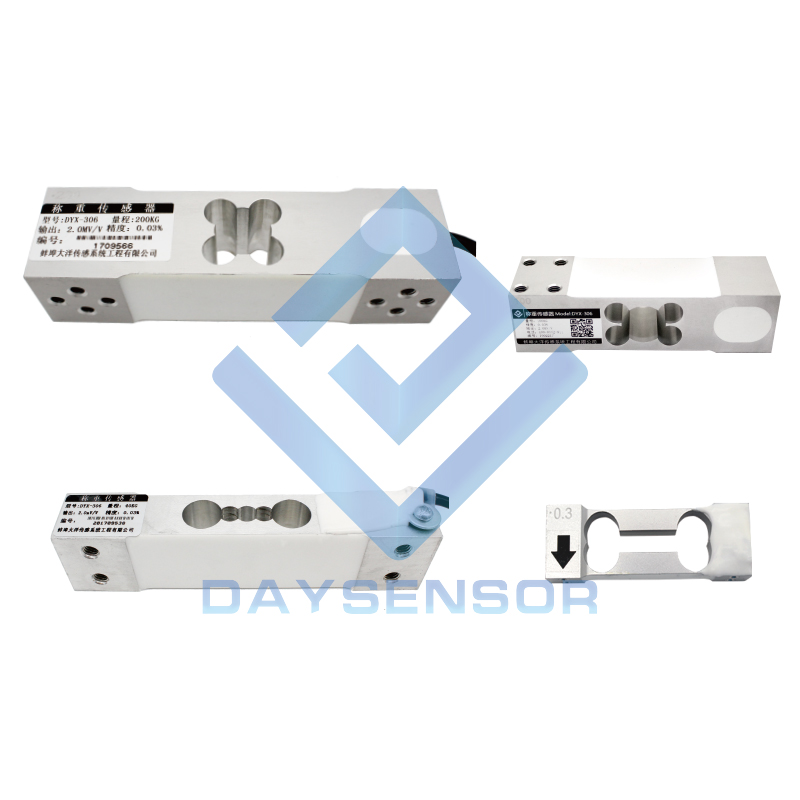
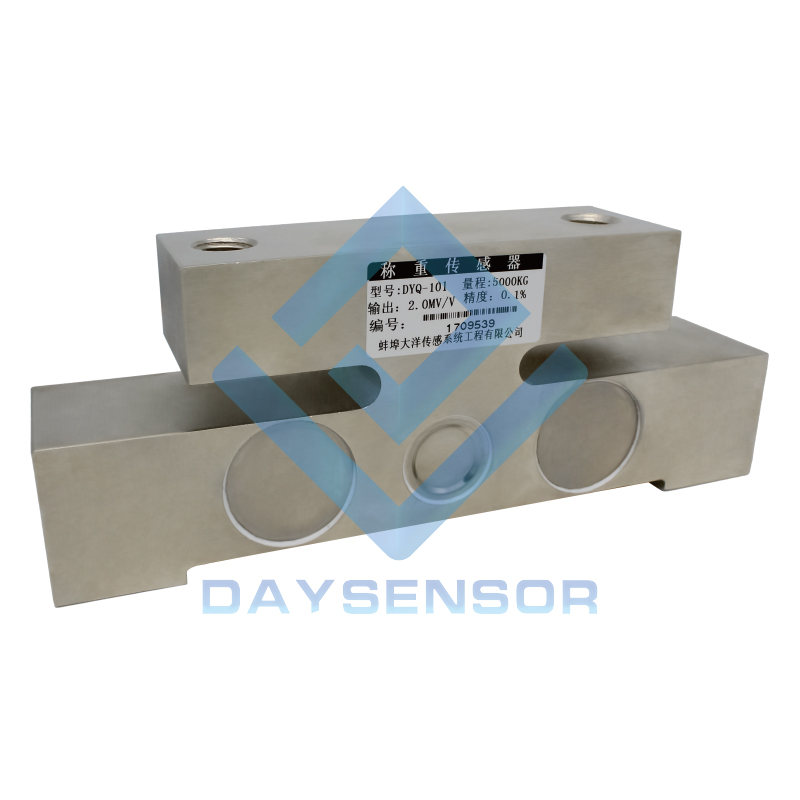
公司已具备将力学、扭矩、机械、电子、算法技术综合应用于传感器产品的研发能力和规模化生产能力。主要产品有:测力传感器、动态扭矩传感器、六维力传感器、位移传感器、高速测力采集仪表、智能数字变送器、软件测量系统等;拥有多项专利技术,产品广泛应用于先进制造、工业自动化、机器人、压装,配料等领域。
愿景:用技术让世界变得更美好。
使命:致力于建立国人自己的智能传感器民族品牌,不断创新,为客户提供高性能、高可靠性的传感器产品和优质的服务。
xxxx有限公司是一家以自主研发为核心的国家级高新技术企业,目前已通过ISO9001质量管理体系认证,是深圳市机器人协会会员、深圳物联网协会高级会员、深圳市中小企业发展促进会会员单位等。
大洋传感器自建立之初就确立了以技术创新作为基础,以客户和市场需求为导向,建立了完备的研发创新体系,从研发理念、组织机构、研发流程和管理制度进行了系统的构建,以保持公司技术的领先和不断进步。作为国家高新技术企业,目前公司已经具备涉及力学、扭矩、软件、仪表、算法等方面的核心技术,并综合运用于传感器产品的开发和规模化生产,拥有多项自主知识产权和专利技术。公司专注于高性能、高可靠性的高端智能传感器研发和制造,结合先进制造、工业机器人等专业领域客户的市场需求和反馈,不断创新和积累,目前已经构建了成熟、多元化的产品线,包括高精度测力传感器、扭矩传感器、仪器仪表、软件测量系统等多个系列产品,并且在性能、稳定性和软件算法等方面具有领先的优势,产品广泛应用于先进制造、工业自动化、机器人、智能交通、物联网等领域。
作为技术创新型企业,海伯森将继续坚持自主创新,以长期的技术积累作为公司可持续发展的基础,在激烈的市场竞争中不断前行。
 扫一扫添加微信
扫一扫添加微信